Abstract
Generalized in-hand manipulation has long been an unsolved challenge of robotics. As a small step towards this grand goal, we demonstrate how to design and learn a simple adaptive controller to achieve in-hand object rotation using only fingertips. The controller is trained entirely in simulation on only cylindrical objects, which then – without any fine-tuning – can be directly deployed to a real robot hand to rotate dozens of objects with diverse sizes, shapes, and weights over the z-axis. This is achieved via rapid online adaptation of the robot’s controller to the object properties using only proprioception history. Furthermore, natural and stable finger gaits automatically emerge from training the control policy via reinforcement learning.
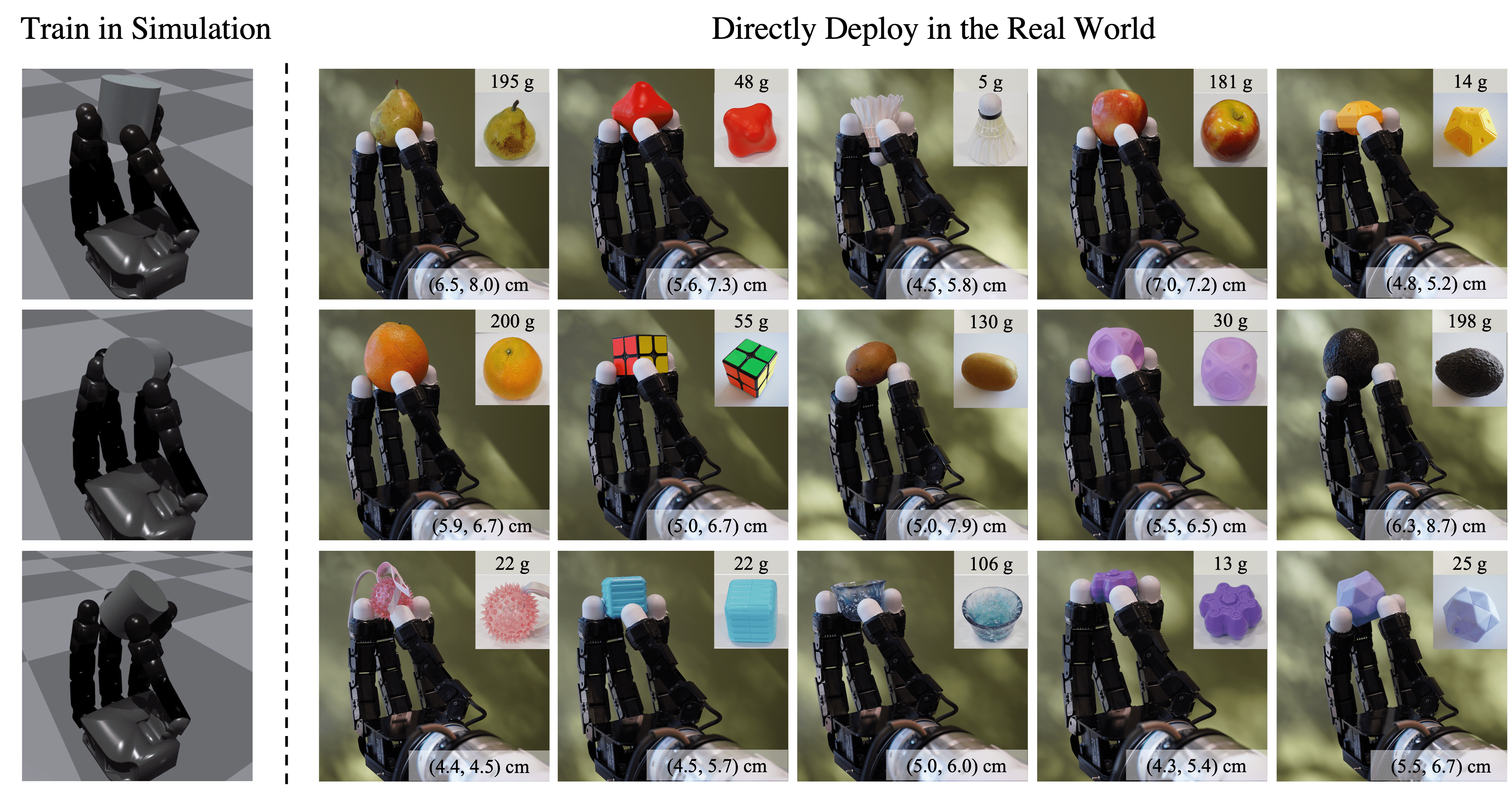
Rotate Different Objects using the Fingertips
[Click to see more objects]
Online Adaptation of Object's Size
Online Adaptation of Object's Mass
Multi-Axis Rotation Policy
We also explore the possibility of perform goal-conditioned in-hand object rotation. This policy can perform different axis rotations according to different inputs.
Cylinders v.s. Spheres
Training with Cylindrical Objects is critical to the emergence of a stable and high-clerance gait. The following video shows the gait we got if we only use sphere objects for training.
Comparison v.s. Baselines
[Click to see other baseline comparisons]
Bibtex
@InProceedings{qi2022hand,
author={Qi, Haozhi and Kumar, Ashish and Calandra, Roberto and Ma, Yi and Malik, Jitendra},
title={{In-Hand Object Rotation via Rapid Motor Adaptation}},
booktitle={Conference on Robot Learning (CoRL)},
year={2022}
}
Acknowledgements:
This research was supported as a BAIR Open Research Common Project with Meta. In addition, in their academic roles at UC Berkeley, Haozhi, Ashish, and Jitendra were supported in part by DARPA Machine Common Sense (MCS) and Haozhi and Yi by ONR (N00014-20-1-2002 and N00014-22-1-2102). We thank Tingfan Wu and Mike Lambeta for their generous help on the hardware setup, Xinru Yang for her help on recording real-world videos. We also thank Mike Lambeta, Yu Sun, Tingfan Wu, Huazhe Xu, and Xinru Yang for providing feedback on earlier versions of this project.